厦门大学海洋生物地球化学全国重点实验室与水声通信及海洋信息技术教育部重点实验室的智能声感知研究团队(Laboratory of Intelligent Acoustic Sensing, LIAS),在船舶路径自主规划领域取得了突破。相关研究成果以“Automated graph-based path planning for navigating maritime traffic”为题,发表在权威期刊 IEEE Transactions on Intelligent Transportation Systems。
该研究提出了一种基于数据驱动的海上航线规划框架。通过融合海量历史AIS航迹数据与环境约束条件,构建出可精准反映真实交通流的有向海事网络。在此基础上,该方法能将航线规划转化为图搜索问题,结合多种成本函数与局部优化,智能避开禁航区并确保航行平稳。经实际船舶数据验证,该方法相比实际航行可缩短时间约8%、减少航程约4%。与当前最先进算法(Rapidly exploring Random Tree, RRT)相比,该方法在所研究的丹麦近海不仅保持了稳定的航程距离缩减效果,同时仍能确保导航可行性。
研究背景
航海大数据蕴含的降本增效潜力
数十年来,海上运输规模持续扩大,已成为支撑全球贸易的主要运输方式。然而,统计表明,约85%的海难事故与航行事故相关,航行安全问题因此成为海事领域关注的核心。随着研究的不断深入,相关工作重点已逐步由事故处置逐渐转向安全航行策略。为此,国际海事组织(IMO)将电子导航作为协调海上信息管理的框架。新加坡港等先进港口已引入船舶交通管理系统以降低风险。
自动识别系统(AIS)是船舶动态信息的关键来源,广泛应用于轨迹预测等领域。然而,AIS数据易受数据传输环境干扰等影响,不同区域的数据质量差异显著,且缺乏元数据,限制了其在路径规划中的直接使用。
现有船舶路径规划方法多依赖实时导航信息,对大规模历史交通数据的利用有限,未能充分挖掘历史AIS轨迹中重复的航行模式和长期风险特征。这些不足推动了结合船舶历史行为数据的路径规划方法研究,以提升航线的安全性与运输效率。
研究结果
图论与航海大数据的有机结合
研究团队依据2023年期间丹麦周边水域(范围从北纬53度、东经4度延伸至北纬59度、东经17度)的3.592亿条油轮AIS数据、4.108亿条货船记录以及4.918亿条客船信息,构建了图网络模型,全面验证了所提出的基于图论的船舶自动路径规划新方法在航海领域降本增效方面的实际效果。
1. 基于图论构建海上交通“路网”的新方法
海上缺乏陆地那样的交通路网,所以有必要构建图网络。利用船舶海上航行的历史AIS数据,通过评估不同参数组合下航迹的复现能力,确定节点距离、最小停靠时间、最小转向角等参数,从而构建图网络。其中,节点与边分别对应不同的航行路径;边的成本被计算出来,并作为后续路径规划过程中的关键参数使用。
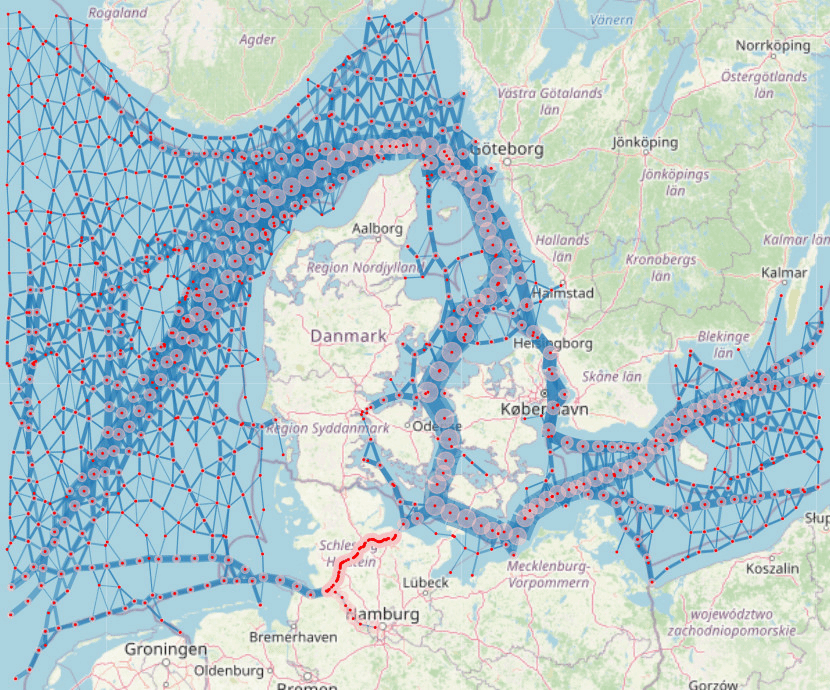
(a)
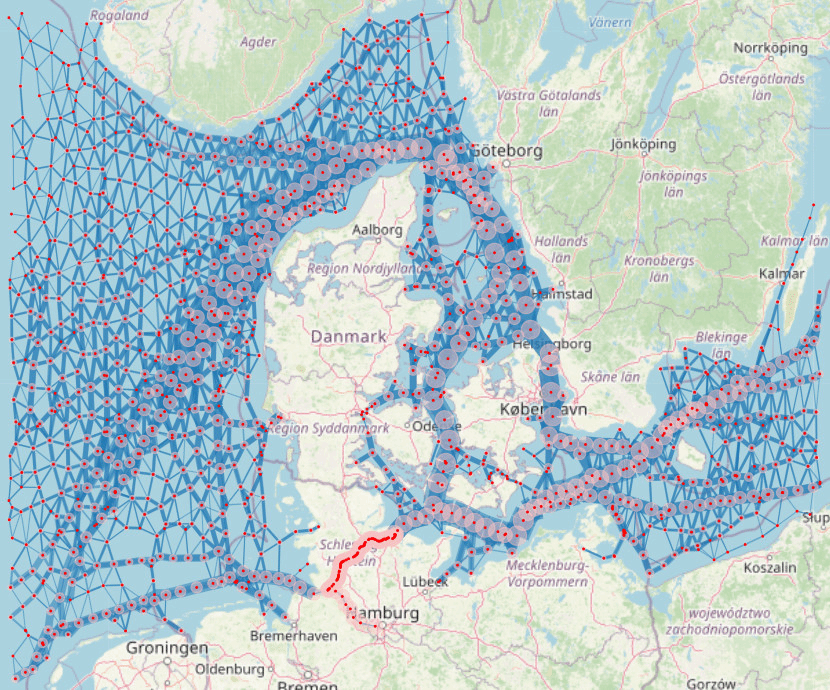
(b)
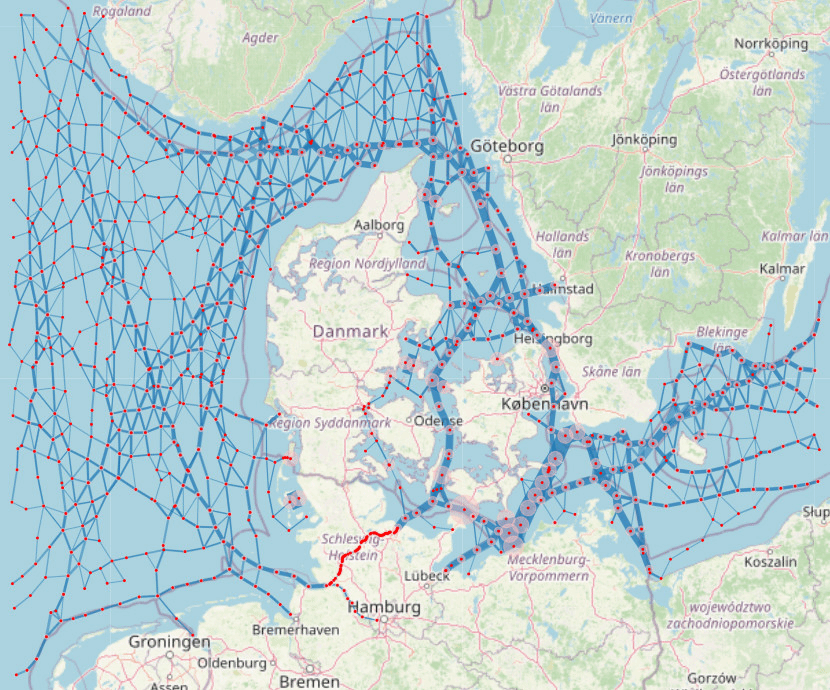
(c)
图1. 从AIS数据集中,通过图论方法得出的海上交通“路网”中的“路口”节点与“船流量”边。(a)油轮;(b)货轮;(c)客轮。
2. 考虑本地海况的路径局部优化新方案
针对油轮、货轮以及客轮这三种船型,分别依据概率成本、距离成本和时间成本这三项指标计算出三条路径,并在6米与12米这两种典型吃水深度工况下进行实验验证。相较于原始全局路径,本研究借助样条函数优化技术实现曲率的平缓改变。经过局部优化的航线既保留了图规划器的大尺度结构特性,又切实消除了岸线和港口附近的小尺度碰撞风险与锯齿状航段,且整体航程长度没有显著变动。
(a)
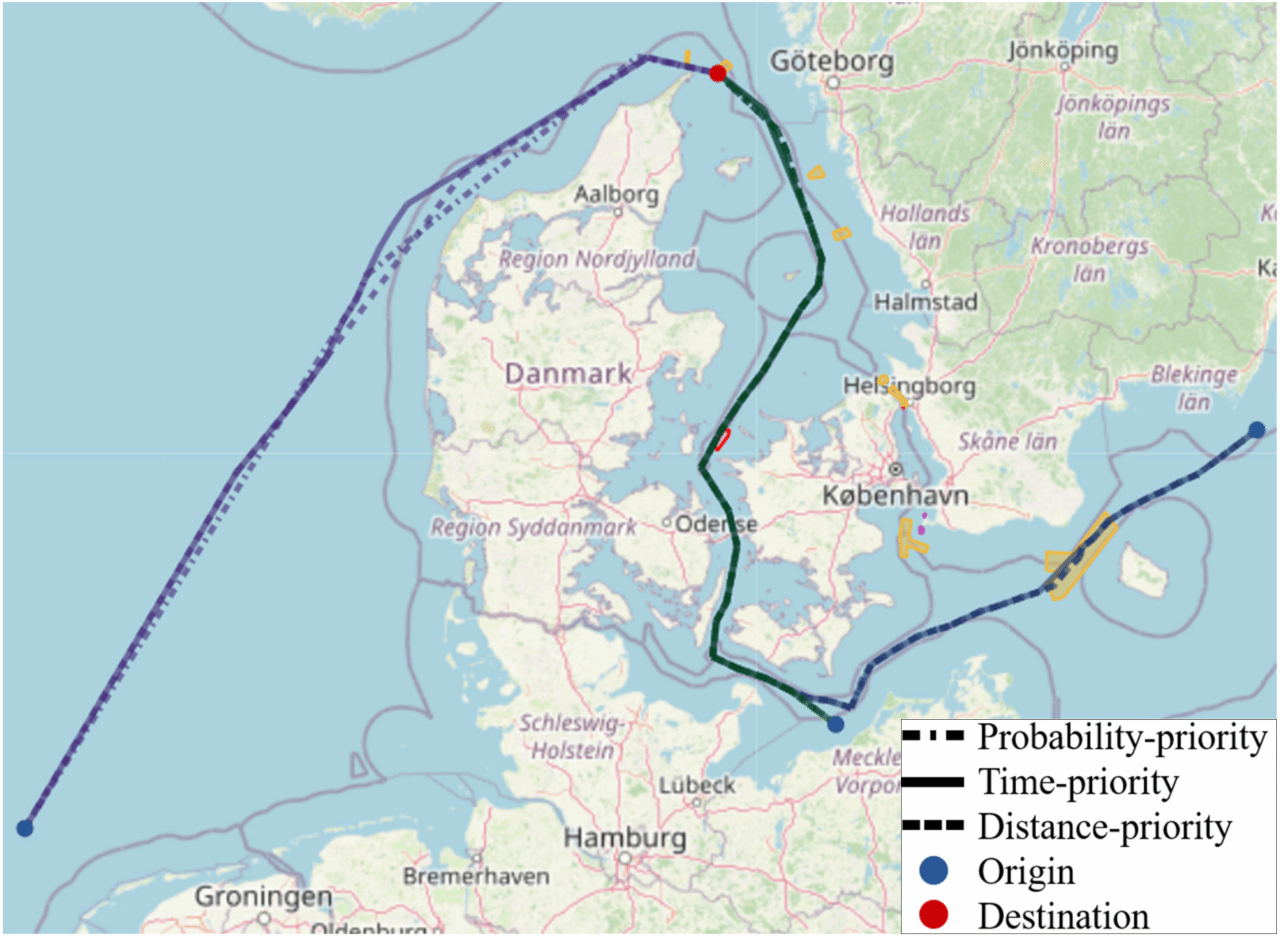
(b)
(c)
图2. 不同方式下的路径规划方案(a)6米吃水工况下未进行局部优化;(b)12米吃水工况下未实施局部优化;(c)已做局部优化的。
3. 超越主流先进算法的规划效果
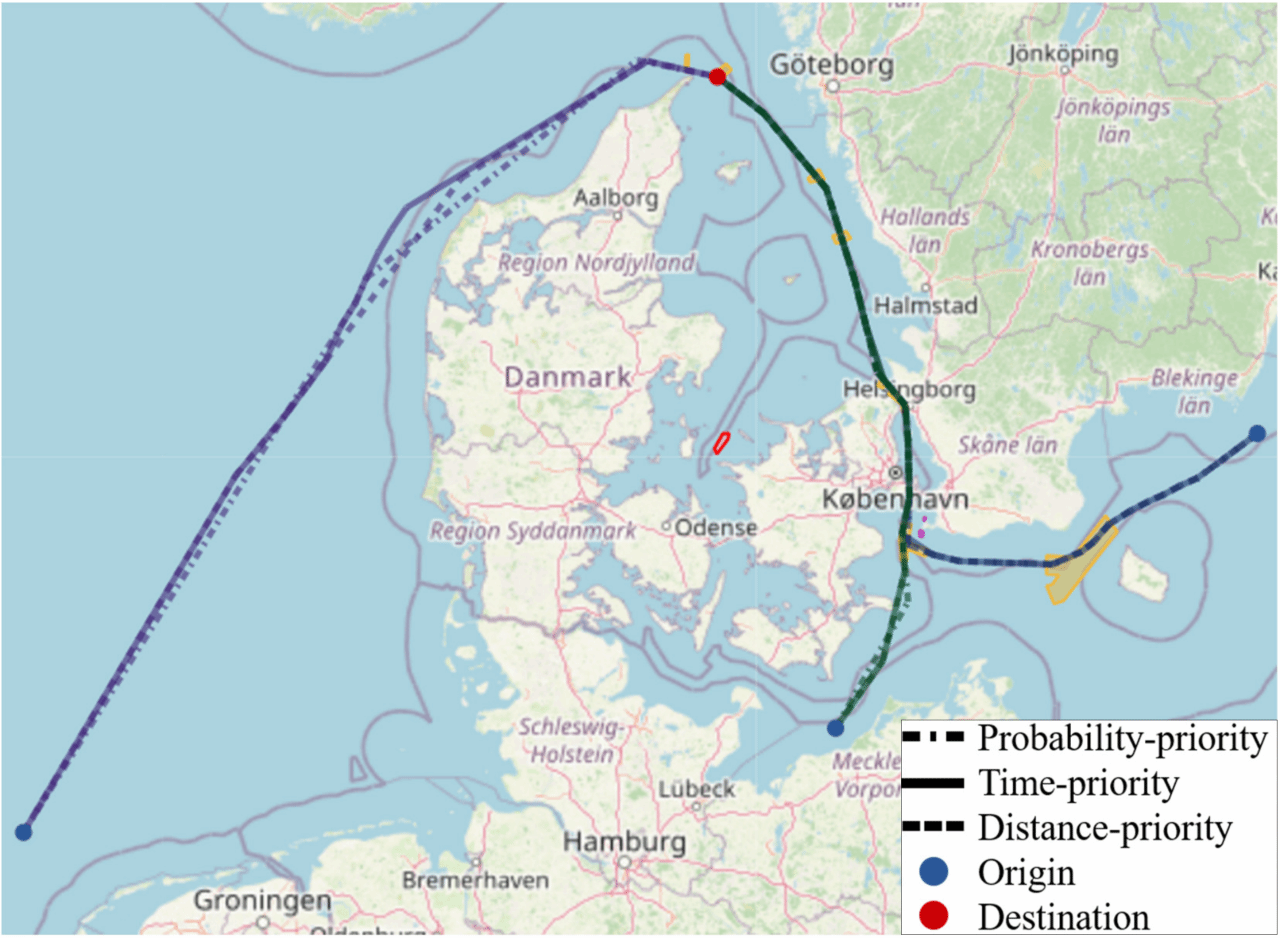
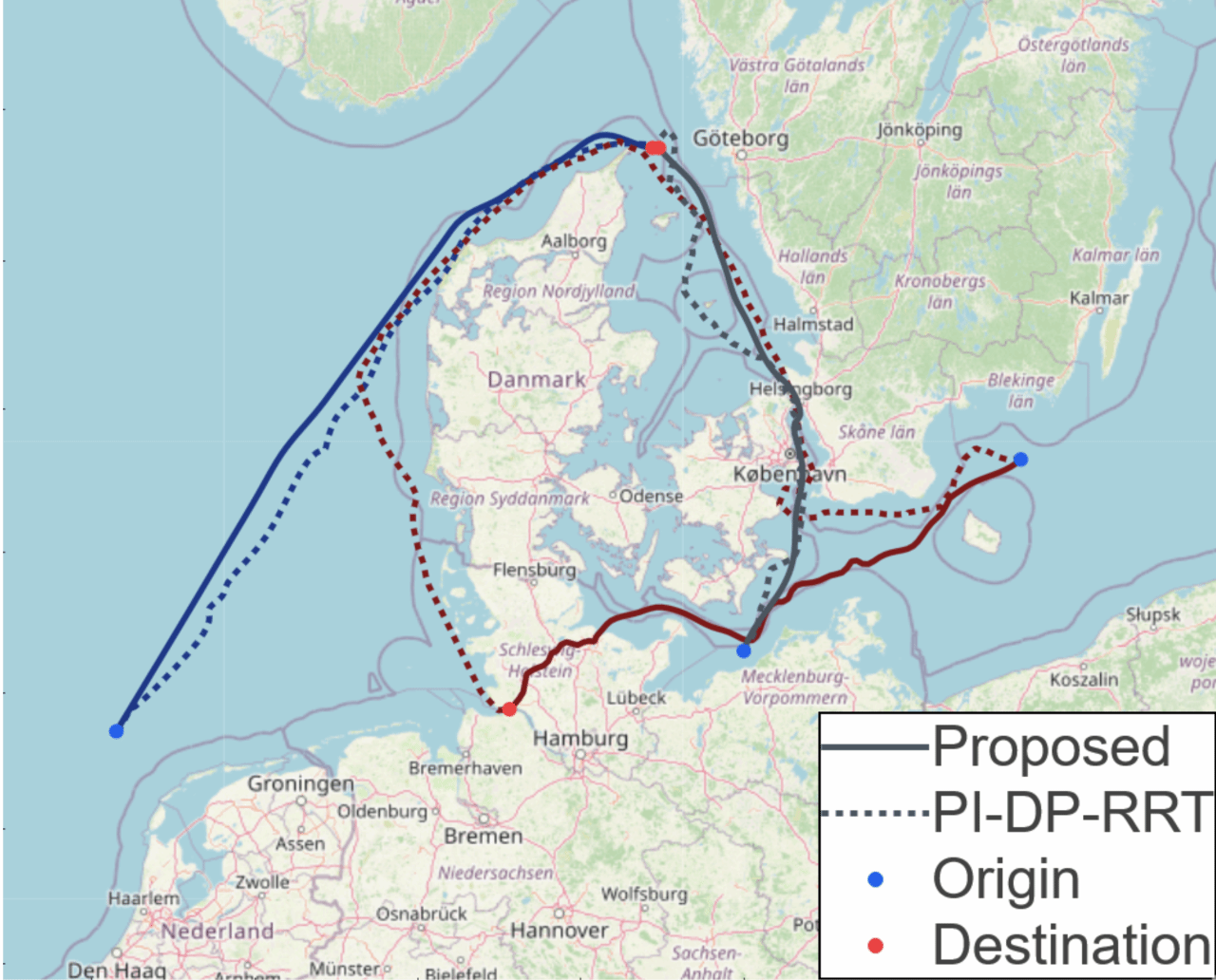
通过图论与局部优化方法生成的路径,始终位于AIS中位数或其下方,并处于四分位距区间内。然而,PI-DP-RRT规划的路径通常位于中位数之上,且经常接近甚至超出上须线,这表明其路径较长且实际可行性较低。在不同航段中,所提出的路线相较于AIS中位数缩短了1.26%至5.61%,而相较于PI-DP-RRT则减少了3.90%至16.08%。这证明该完整框架生成的路径不仅契合历史通行习惯与公共航行计划,还显著优于PI-DP-RRT基准方案。
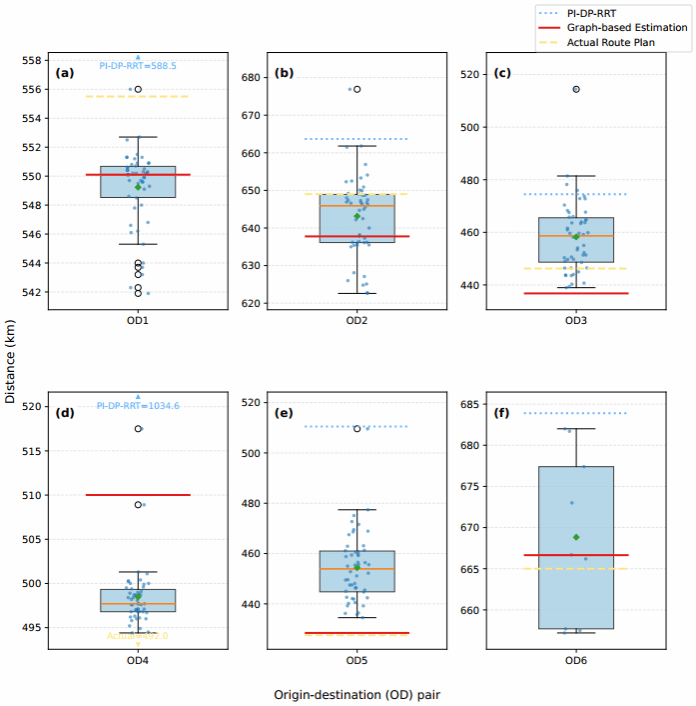
图3. 实际航行轨迹与两种路径规划方法的对比
研究意义及展望
本研究设计了一种以图论为基础的AIS船舶路径规划框架,通过提取关键点并进行聚类生成航点,再利用聚合轨迹段将这些航点连接起来,把历史AIS航迹转化为有向海事航线网络,从而精确反映交通流量与航行模式的特点。该方法在确保航行安全的基础上,显著缩短了船舶到达目的地的时间与距离,具有较好的应用潜力。研究团队强调,未来应用时应全面考虑实时气象与洋流等要素以保障航行安全,同时需特别关注公海区域的避碰策略及季节性航线变化规律。通过在多种港口与沿海水域进行验证测试,能够有效评估该框架的实用性与可扩展性。此外,应注意实际航行中可能出现的航线偏移问题。
研究团队及资助
该论文的第一作者是厦门大学李姜辉教授,通讯作者为杭州电子科技大学的刘春山教授,共同作者有中船集团第710研究所的刘津良以及杭州电子科技大学的硕士研究生姜芃。该研究得到了国家科技重大专项课题(2024ZD1406604)和福建省科技计划项目(2025H0001)的联合资助。
论文来源及链接
Jianghui Li, Jinliang Liu, Chunshan Liu*. (2026). Peng Jiang. Automated graph-based path planning for navigating maritime traffic. IEEE Transactions on Intelligent Transportation Systems, 1-14.
https://doi.org/10.1109/TITS.2026.3678113
供稿 | 智能声感知团队(LIAS)
编辑 | 房月
排版 | 陈蕾
审核 | 上官明佳 庄伟

